任意物体の3次元運動の推定
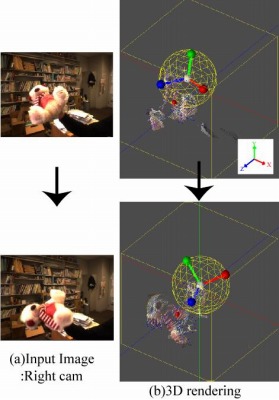
ロボットが障害物を回避し、作業対象となる物体を認識するには、環境や物体の3次元構造と運動を検出する必要があります。本研究では、ステレオカメラによって得られる距離画像に基づき、物体の3次元運動を検出します。図では回転するぬいぐるみの運動を検出しています。ぬいぐるみの回転に伴って、CGで描かれた黄色の球体も回転していることが分かります。
連絡先
- 青木公也(kaoki★sist.chukyo-u.ac.jp)
※「★」記号を「@」に置き換えてください。
research
ロボットが障害物を回避し、作業対象となる物体を認識するには、環境や物体の3次元構造と運動を検出する必要があります。本研究では、ステレオカメラによって得られる距離画像に基づき、物体の3次元運動を検出します。図では回転するぬいぐるみの運動を検出しています。ぬいぐるみの回転に伴って、CGで描かれた黄色の球体も回転していることが分かります。
※「★」記号を「@」に置き換えてください。