小型レスキューロボットの開発
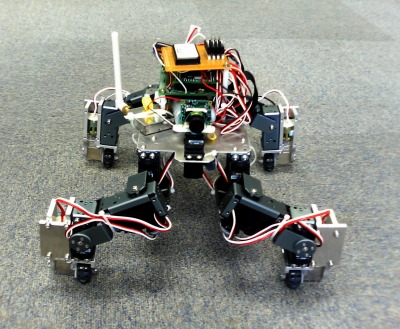
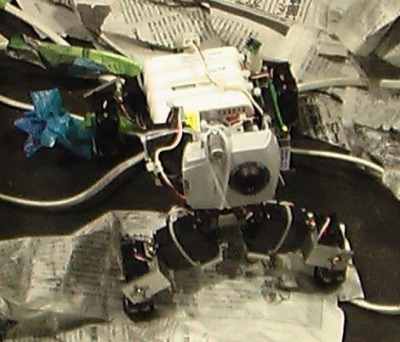
自然災害での救助活動で、レスキュー隊員の不足を補うため、初期探査を自動的に行う小型のレスキューロボットが必要とされている。清水研究室では、積み重なった瓦礫の上や内部など不整地に適応しやすい4足歩行機構を備えた小型レスキューロボットを開発している。写真1のロボットは、足先に駆動輪を装備して、移動速度と走破性を向上させたモデルである。写真2のロボットは、さらに小型化し、高画質な映像取得などを目的として一般的な無線LANに対応させたモデルである(撮影場所:RoboCUP JapanOpen2007 Rescue Robot League)。.5%という極めて少数のデータを使うだけでより高信頼に認識する技術を開発しました。世界最高速クラスの性能を誇り、生産ラインにおける部品の位置決めや、自律歩行ロボットの眼、さらには車載カメラなどへの応用を目指しています
連絡先
- 清水 優(shimizu★sist.chukyo-u.ac.jp)
※「★」記号を「@」に置き換えてください。