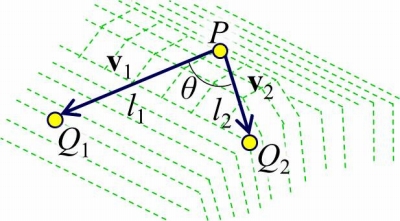
選択された独自性の高いベクトルペア
提案するベクトルペア特徴
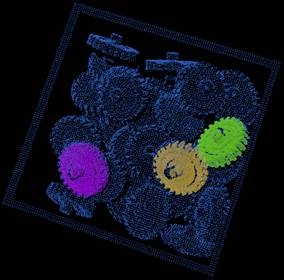
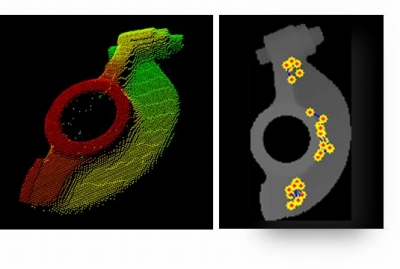
3次元位置姿勢認識結果
ロボットのための3次元センシング
生産ラインにおける組み立て作業を完全にロボット化するために必要な、対象物体の3次元認識技術を開発しています。本研究では、乱雑に置かれた物体を正確に見分けるために有効なデータを自動的に算出し、構造化光レンジファインダによって得られた面方向データ群をもとに、品種・位置・姿勢を認識しています。人間に替わる熟練作業の実現を目指しています。.5%という極めて少数のデータを使うだけでより高信頼に認識する技術を開発しました。世界最高速クラスの性能を誇り、生産ラインにおける部品の位置決めや、自律歩行ロボットの眼、さらには車載カメラなどへの応用を目指しています
連絡先
- 橋本 学(mana★isl.sist.chukyo-u.ac.jp)
※「★」記号を「@」に置き換えてください。