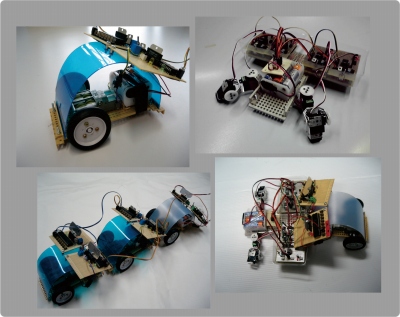
モジュールロボット
本研究は、様々な形状や機能を持つロボットを構成できるハードウェアモジュールの開発を目的とします。ここで開発するモジュールは適応的に他のモジュールとの接続形状を形成することができます。これにより、ロボットの設計工程を単純化できるだけでなく、ロボットの頑強性と拡張性の向上を図ることができます。.5%という極めて少数のデータを使うだけでより高信頼に認識する技術を開発しました。世界最高速クラスの性能を誇り、生産ラインにおける部品の位置決めや、自律歩行ロボットの眼、さらには車載カメラなどへの応用を目指しています
連絡先
- ピトヨ ピーター ハルトノ(hartono★sist.chukyo-u.ac.jp)
※「★」記号を「@」に置き換えてください。